
Collective Intelligence
|
|
Pia Bideau |
|
|
| Summary |
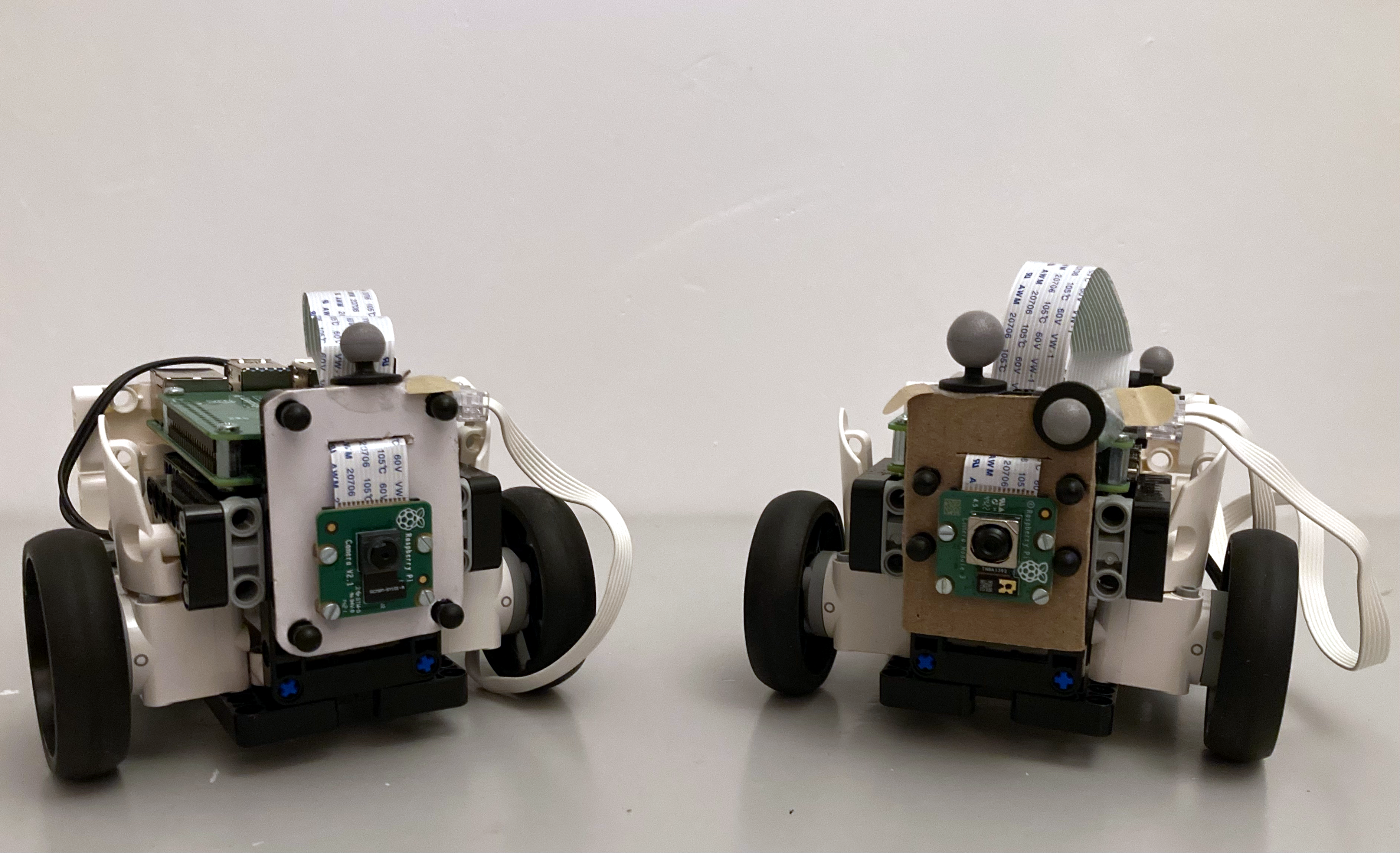
Distance estimation is an essential aspect of self-orientation, allowing agents to move in a natural environment. In particular when animals move in teams (e.g. fish schools, flocking birds), they seem to localize themself relative to their neighbors - efficient and accurate enough such that quite astonishing behaviors arise. Throughout this assignment students will develop a synthetic approach simulating simple collective behavior, which will be deployed on a lego-robot platform. The assignment covers four major parts:
The project material is designed for graduate students with working knowledge of Python. For the teacher we provide lecture slides of the first, second and fourth assignment part; we provide a code framework that includes instructions for students that guide them to finish the implementation with a focus on perspective projection and path planning; and sample solutions for the teacher. |
|---|---|
| Topics | Perspective projection, training/validation and testing in machine learning, buffered voronoi cells, path planning, motion planning, and multi-agent/multi-robot coordination. |
| Audience | Graduate students who took an “introduction to artificial intelligence” or more advanced artificial intelligence classes. |
| Difficulty | Easy to moderate difficulty. Distance estimation and path planning can be both finished within 2 hours. The deployment of the combined version of path planning based on distance estimation on the lego-robot platform will take additional 2 hours (without the hardware setup). This assignment can be made significantly harder (and longer) if less code is provided. |
| Strengths | The project includes teacher slides providing an introduction to important concepts of distance estimation, single robot operation, and multi-robot collision avoidance. We provide instructions and code to deploy and test developed code on a lego robot platform. Lego robots provide an easy accessible way towards developing a working system in real world with overseable amount of efford. |
| Weaknesses | The project requires working knowledge of Python 3. Students only have to fill in gaps in the provided source code, which might prevent them from understanding and building connections between individual parts. The fourth part of this assignment "Analyzing natural collective behavior" requires an experimental setup with animals. While observing natural behavior might be a valuable part in this context, its realization might not be feasible in many cases. We provide video material together with teacher instructions which could be used instead. |
| Variants |
|
| Dependencies |
Requirements (assignment variant A, B and C):
or
|